|
Modellhubschrauber
 |
DatenloggerWas die Fischer können, können die Helipiloten schon lange. Wer fliegt seinen Hubi nicht mit mindestens 3000 U/min in 250 Metern Höhe über die Häuserdächer und zieht dabei soviel Strom aus dem Akku, dass dieser noch in der Luft durch die Hitzeentwicklung in Flammen aufgeht... Viel schöner ist es aber doch, wenn man dieses Helilatein auch noch mit "unangreifbaren" Datenkurven untermauern kann... Wer nicht nur fliegen möchte, sondern auch auch ernsthaft festhalten möchte, in welchen Flugzuständen der Heli welche Betriebsparameter aufweist, benötigt einen sogenannten Datenlogger. Diese kleinen Bauteile sind in der Regel erst einmal ziemlich "dumm", denn sie besitzen in der Grundausstattung meist keine (oder nur wenige eigene) Sensoren, sondern können nur Eingangssignale in regelmäßigen Abständen abspeichern und sie später über eine Schnittstelle auf den PC übertragen. Es ist also am Käufer, die für ihn wichtigen Sensoren hinzuzukaufen und an den Datenlogger anzuschließen. Dabei ist darauf zu achten, dass Sensor und Datenlogger zueinander kompatibel sind. Üblicherweise misst man folgende Parameter im Flug:
Viele Fragestellungen lassen sich durch den Einsatz von Datenloggern klären, z.B möchte man häufig wissen, wie konstant der Regler im Governor-Modus arbeitet, also ob die Drehzahl bei drastsichen Leistungs-/Höhenänderungen einbricht. Ebenso ist es wichtig zu wissen, welcher Strom überhaupt fließt, um die richtigen Akkus zu kaufen oder die Entscheidung für einen alternativen Regler zu fällen. Ein Datenlogger wird üblicherweise an einen freien Empfängerkanal angeschlossen und bezieht seinen Strom auch von diesem. Zusätzlich kann man das Sendersignal zum Einstellen von Parametern verwenden. Wenn man sich einen Datenlogger zulegen möchte, sollte man auf folgende Eigenschaften achten:
Das Beispiel UniLog der Firma SM-ModellbauDer UniLog beherrscht ohne Zusatzsensoren bereits die Messung der Höhe, kann aber durch verschiedene Zusatzsensoren auch Spannung, Strom, Leistung, Kapazität, Drehzahl und Temperatur mitloggen. Die Übertragung der Messdaten zum PC geschieht über ein USB-Interface, über den eine serielle Schnittstelle "getunnelt" wird. Das Einlesen der Daten geschieht über ein Excel-Makro (ab MS-Office 2000), welches wie der USB-Treiber von der Seite des Herstellers geladen werden kann (www.sm-modellbau.de -> Softwareupdates: 1. "UniLog Excel Software" 2. "USB-nterface Treiber"). Sehr schön sind im Handbuch die verschiedenen Konstellationen (Kombinationen von angeschlossenen Sensoren) beschrieben. Übersichtliche Zeichnungen illustrieren die Anschlussvarianten. 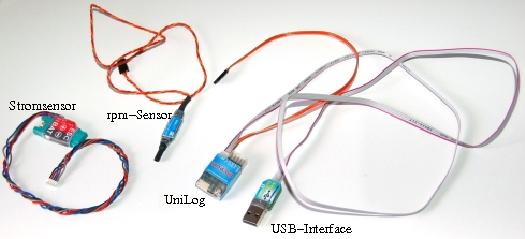 Die Grundeinstellung des Datenloggers muss je nach angeschlossenen Sensoren oder Bautyp des Modells modifiziert werden. Beispielsweise ist für die optische rpm-Messung die Angabe der Anzahl der Messimpulse pro Umdrehung notwendig. Diese Einstellungen werden durch das bereits angesprochene Excel-Makro durchgeführt. Dieses Makro wird auch zum Einlesen der Daten verwendet. Dazu ist es erforderlich, dass man Excel erlaubt, Makros auszuführen. In den neueren Office-Versionen erscheint bei Öffnen des Makros eine gelbe "Einstellungs"-Zeile am oberen Dokumentenrand, über die die Ausführung des Makros akzeptiert wird. (Diese Sicherheitsstufe hat Microsoft eingebaut, damit potentiell gefährliche Makros das System nicht ungefragt kompromittieren können.) Ein Screenshot des Makros sieht man hier: 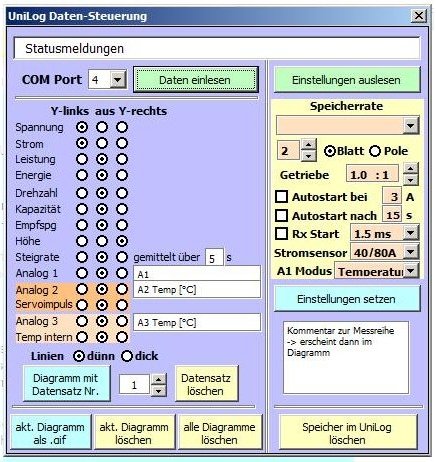 Der Datenlogger wird am Heli an einem freien Kanal des Empfängers angeschlossen. Dieser Kanal liefert einerseits den für den Betrieb nötigen Strom, kann andererseits aber auch für die Ansteuerung des Loggers verwendet werden. Start und Stopp der Messung kann durch folgende Arten angesteuert werden:
Alte Messungen werden im Speicher des UniLogs solange gespeichert, bis sie durch manuelles Löschen per Excel-Makro aus dem Speicher entfernt werden. Beim Einlesen der Messdaten werden stets alle Messdatensätze (auch die alten) in eine Excel-Tabelle eingelesen. 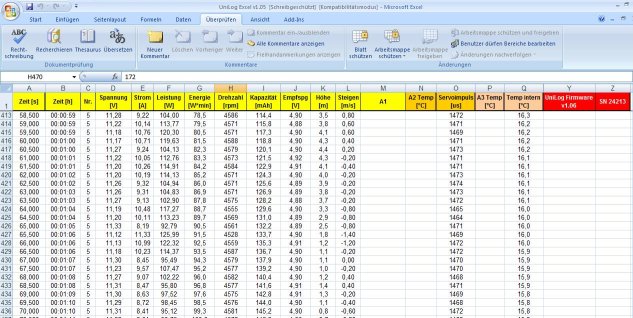 Je nach Belieben kann man sich aus diesen Datentabellen auch nette Diagramme zaubern, die besser veranschaulichen, ob beispielsweise bei einer gewissen Steigrate die Drehzahl einbricht oder der in der Steigphase erforderliche Strom den Akku an seine Grenzen stoßen lässt. |